|
Maria GDK 5.1.0.170
Documentation of native code in develop branch
|
|
Maria GDK 5.1.0.170
Documentation of native code in develop branch
|
#include <MICollisionItemCollection.h>
Public Member Functions | |
| virtual void | getCollisionItems (const std::shared_ptr< RasterProjector > &vp, std::vector< CollisionItem > &collisionItems, std::vector< CollisionItem > &alwaysVisibleItems)=0 |
| get a list of all items to be collision detected. This method must be thread-safe as it will be called from another thread than the main/gui thread. | |
| virtual void | updateVisibility (const std::vector< VisibilityItem > &items)=0 |
| Update the visibility of items according to the given list of collision items. | |
| virtual bool | needsCollisionUpdate (const RasterProjector &vp) const =0 |
| Check if the collection has changed so that we need to recalculate the visibility. This can for example be if any new items have been added or removed, or if items have changed size or shape. Will be run from main thread only. | |
| virtual void | initCollisionUpdate ()=0 |
| Initialize collision update. This will be run after a collision update has been deemed necessary, and before the actual update thread is starting. It can be used to update generation counters, dirty flags, etc. Will be run from main thread only. | |
| virtual int | priority () const =0 |
| Priority of this collection relative to other collections to be collision checked in the same grid. Higher priorities are added first and more likely to be shown. | |
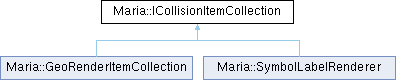
ICollisionItemCollection - Interface for classes that contain items to be decluttered by collision grid checking.
|
pure virtual |
get a list of all items to be collision detected. This method must be thread-safe as it will be called from another thread than the main/gui thread.
| vp | Include items in this viewport. |
| collisionItems | (output) vector of CollisionItems |
| alwaysVisibleItems | (output) vector of items that should always be visible |
Implemented in Maria::GeoRenderItemCollection, and Maria::SymbolLabelRenderer.
|
pure virtual |
Initialize collision update. This will be run after a collision update has been deemed necessary, and before the actual update thread is starting. It can be used to update generation counters, dirty flags, etc. Will be run from main thread only.
Implemented in Maria::GeoRenderItemCollection, and Maria::SymbolLabelRenderer.
|
pure virtual |
Check if the collection has changed so that we need to recalculate the visibility. This can for example be if any new items have been added or removed, or if items have changed size or shape. Will be run from main thread only.
| vp | Only include items in this viewport. |
Implemented in Maria::GeoRenderItemCollection, and Maria::SymbolLabelRenderer.
|
pure virtual |
Priority of this collection relative to other collections to be collision checked in the same grid. Higher priorities are added first and more likely to be shown.
Implemented in Maria::GeoRenderItemCollection, and Maria::SymbolLabelRenderer.
|
pure virtual |
Update the visibility of items according to the given list of collision items.
| items | Items with visibility information. |
Implemented in Maria::GeoRenderItemCollection, and Maria::SymbolLabelRenderer.